

高速开关阀作为数字液压系统的核心控制元件,具有结构紧凑、频响高、抗污染能力强等优点,广泛应用在航空航天、工程机械、军工设备等关键领域。高速开关阀连续启闭时生成的离散流体在空间中融合后可比拟连续流体的传动效果,并且在一定范围内,离散流体的生成频率越高,其比拟连续流体控制的效果就越好,因此提高频响能改善高速开关阀控制系统的动静态性能。针对现有的高速开关阀,优化驱动控制方法是提升其频响特性最直接和最经济的方式,因此本文提出了一种基于预加载技术的高速开关阀控制方法,以优化高速开关阀在不同占空比工况下的频响特性。
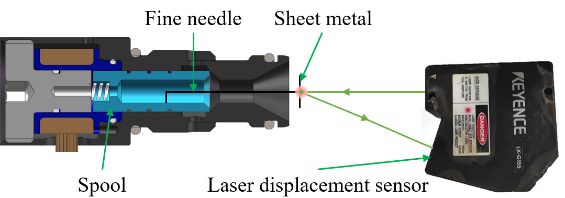
频响特性的检测需根据高速开关阀阀芯的位移情况判断其是否完全启闭,以验证当前频率和占空比下高速开关阀的响应情况。由于高速开关阀紧凑的封闭结构,使用传统的位移传感器将很难检测阀芯的位移。为了解决这个问题,本文创新性的提出了一种阀芯位移引出结构,如下图所示。细针用于连接阀芯和金属板以确保它们具有相同的动态性能,激光位移传感器通过测量金属板的位移情况获得高速开关阀的动态性能。
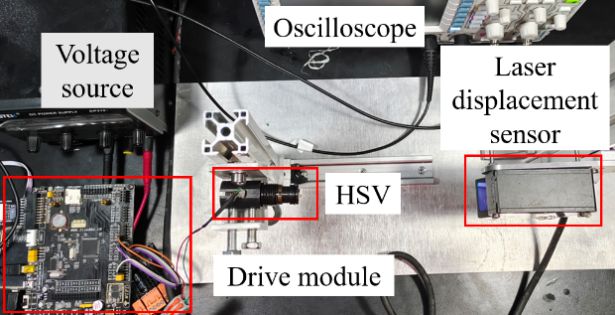
基于以上检测方法,本文开展了不同驱动策略控制下高速开关阀的频响实验研究,实验平台如下图所示,包括电压源、示波器、控制模块、高速开关阀和激光位移传感器。实验目标为获得不同占空比下高速开关阀能够达到的最高工作频响。实验预先设定高速开关阀的启闭占空比,根据不同频率设定电压的加载时长,从低频响工况开始逐步提高频率,直至高速开关阀无法正常启闭(位移曲线没有达到最大位移值或位移曲线未降低至原点),获得当前占空比下高速开关阀的最高频响。更改启闭占空比,重复此实验即可得到各个占空比下的高速开关阀最高工作频率数据,并将其汇总为全占空比区间高速开关阀的频响图。
采用单电压、三电压和预加载控制算法驱动高速开关阀进行动态特性和频响特性实验。由于相同的开启加载策略,单电压与三电压控制下的阀芯开启时间分别为较为接近的2.31ms与2.28ms。而增加了开启预加载阶段的预加载控制算法控制下的阀芯开启滞后时间约为0.38ms,相比单电压和三电压1.5ms和1.45ms的开启滞后时间,其开启动态性能得到了大幅提高。在此影响下,与三电压相比,预加载控制算法在不同控制信号占空比工况下(10%至45%)获得的最高启闭频率平均增加了93Hz。同理,由于开启维持电压与反向高电压的作用,相比单电压控制算法,预加载控制算法驱动下的关闭滞后时间从2.96ms减少到0.42ms,关闭运动时间从1.24ms优化到0.77ms,在不同控制信号占空比工况下(60%至90%的SDR)的最高启闭频率增加了近300%。
从不同控制算法下的最高启闭频率的总实验结果图中可以发现,当采用更有效的控制算法(预加载控制算法)时,高速开关阀的最高启闭频率可以在大约50%的控制信号占空比下达到417Hz。相反,当控制信号占空比为30%时,单电压驱动的高速开关阀的极限最高启闭频率约为130Hz。在250 Hz频率响应条件下,预加载控制算法的可调控制信号占空比范围为20%至70%,与三电压的32%至68%的范围相比,增加了约14%。
本文通过预加载技术实现高速开关阀更高的频率响应和更宽的控制信号占空比范围调节。频响特性实验表明,预加载控制算法在不提高驱动电压的情况下,有效地减少了开启滞后时间,提高了可控的控制信号占空比和最高启闭频率。然而,应该注意的是,高速开关阀的最高启闭频率与控制信号占空比并没有表现出完全的线性关系。在较高频率的工作条件下,最高启闭频率的增加将在一定程度上受到限制。高速开关阀较高的频率响应意味着较小的可控控制信号占空比范围。为了获得更高的开关频率,建议高速开关阀控制系统尽可能避免在过小或过大的控制信号占空比工况下工作,从而实现更快的响应速度和更高的控制精度。
液压阀是液压系统的核心控制元件,决定着装备综合性能和系统整体效率。传统液压控制系统的核心控制元件中,伺服阀虽然动静态性能优越,但是抗污染能力差且价格昂贵,难以大面积普及;比例阀存在中位死区和内泄露,而且滞环严重、频响较低,直接影响被控对象的动态性能和控制精度。数字液压技术是一项新兴的流体传动控制技术,通过离散流体的融合,进行功率传输与能量传递。而作为数字液压技术的核心控制元件,高速开关阀是生成离散流体的核心元件,其结构简单、可靠性高、响应快且价格低廉,因为只有“开”和“关”两种工作状态,因此其节流损失小、工作效率高。现有研究已经证明了离散流体频率的提高可以改善高速开关阀控系统的控制精度。因此,频响特性是衡量高速开关阀阀控系统性能的重要指标,也是确保数字液压系统控制精度的关键。本文通过理论分析与实验结果对比证明了可以通过缩短启闭时间来优化高速开关阀的频响特性,验证了预加载技术在提高高速开关阀最大启闭频率研究中的作用。得益于预加载控制算法下高速开关阀优秀的频率响应特性,预加载技术能在保证控制精度的前提下实现高速开关阀更大的流量可控范围,在数字阀控系统高精度与高动态控制方面具有巨大的潜力。
[5] 钟麒,何贤剑,李研彪,等. 自适应供油压力变化的高速开关阀控制策略研究[J]. 机械工程学报, 2021, 57(6): 224-235.

李研彪,博士、教授、博士生导师,浙江省新世纪151人才工程,浙江省杰出青年基金项目获得者,浙江省中青年学科带头人,澳大利亚科廷大学访问学者,现任浙江工业大学科学技术研究院副院长。

钟麒(第一作者),2019年获浙江大学工学博士学位,导师杨华勇院士,现为浙江工业大学校团委副书记、校聘教授、博士研究生导师,入选中国科协青年人才托举工程、浙江省“万人计划”科技创新领军人才,获上银优秀机械博士论文奖铜奖、中国青少年科技创新奖、浙江大学优秀博士学位论文奖、浙江省优秀博士学位论文奖、浙江省科技进步二等奖(排1)、中国机械工业科技进步二等奖(排1)。
[11] 钟麒,何贤剑,李研彪,等. 自适应供油压力变化的高速开关阀控制策略研究[J]. 机械工程学报, 2021, 57(6): 224-235.
JME学院是由《机械工程学报》编辑部2018年创建,以关注、陪伴青年学者成长为宗旨,努力探索学术传播服务新模式。
有一种合作叫做真诚,有一种发展可以无限,有一种伙伴可以互利共赢,愿我们合作起来流连忘返,发展起来前景可观。关于论文推荐、团队介绍、图书出版、学术直播、招聘信息、会议推广等,请与我们联系。
感谢关注我们!《机械工程学报》编辑部将努力为您打造一个有态度、有深度、有温度的学术媒体!十大买球平台